扫一扫立即咨询
扫一扫立即咨询 留学咨询热线:18071732056
扫一扫立即咨询留学咨询热线:18071732056
留学咨询热线:18071732056
扫一扫立即咨询留学咨询热线:18071732056

"
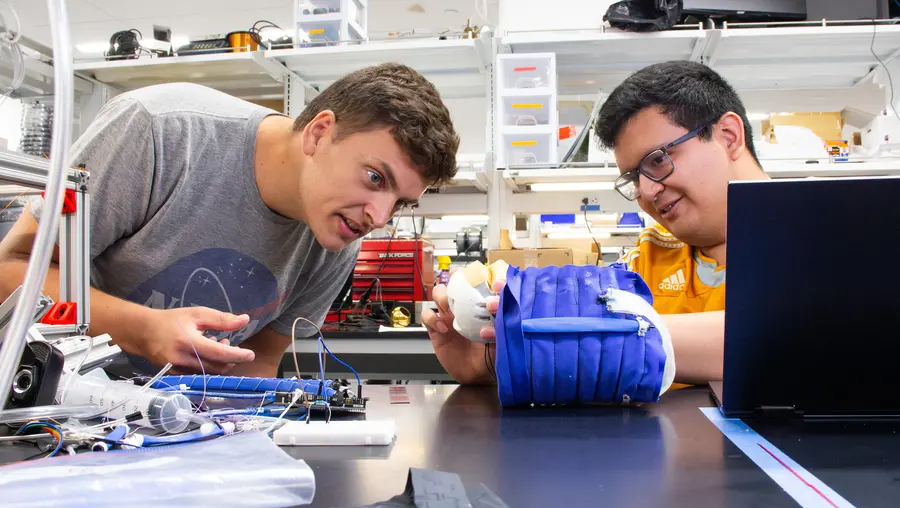
由维多利亚·韦伯斯特-伍德(Victoria Webster-Wood)(opens in new window)领导的卡内基梅隆大学生物混合与有机机器人学组(Biohybrid and Organic Robotics Group,简称B.O.R.G.)(opens in new window)的研究人员,与凯斯西储大学的研究人员合作,正在研究海蛞蝓的进食结构,以更深入地了解大脑、肌肉系统和神经系统的相互作用。
在国家科学基金会NeuroNex网络的支持下,这项研究被用于机器人和模拟中,作为多国研究合作的一部分,以研究神经肌肉系统。
研究观察的是加州海蛞蝓(Aplysia californica),或称海蛞蝓。研究特别关注的是动物的进食结构,这种结构使动物能够与环境进行交互。
“从机械工程的角度来看,这个系统非常有趣,因为没有骨骼——它只是肌肉附着在肌肉上,”机械工程学副教授韦伯斯特-伍德说。“我们对结构中单个肌肉的力学、力量能力和动力学的理解存在很大差距。”
通过研究这些软体动物的神经肌肉控制,研究人员希望更深入地了解某些肌肉结构的工作方式,包括海蛞蝓的躯干、触手、舌头和进食装置本身的肌肉结构。
在海蛞蝓的进食结构中,已识别的10到12个肌肉群中,目前只有一个模型。在他们最近发表在《生物控制论》(Biological Cybernetics)(opens in new window)上的合作工作中,CMU B.O.R.G.与CWRU的Chiel实验室(opens in new window)合作,专注于创建I3肌肉的模型,该肌肉在进食装置内抓取器的回缩中起着关键作用。
韦伯斯特-伍德实验室的博士生拉韦什·苏克南丹(Ravesh Sukhnandan)是这篇论文的第一作者,负责该模型的大部分数据拟合和分析工作。
“这个项目是一个深入了解肌肉生物学和功能的好机会,”苏克南丹说。“从该项目中获得的知识将帮助我们开发更好的加州海蛞蝓进食行为的计算模型,并设计更逼真的受加州海蛞蝓启发的软体机器人。”
随着软体机器人成为越来越有前景的研究领域,韦伯斯特-伍德认为,了解物理肌肉将有助于未来软体机器人的设计和机械性能。
“从长远来看,我的目标是创造可持续、完全生物相容、可生物降解的机器人,”韦伯斯特-伍德说。“因此,我们越能了解现有动物的神经肌肉系统,我们就能越好地设计我们自己的生物混合机器人。”